MACHINES AUTOMATION
The most common production machines for robotization are:
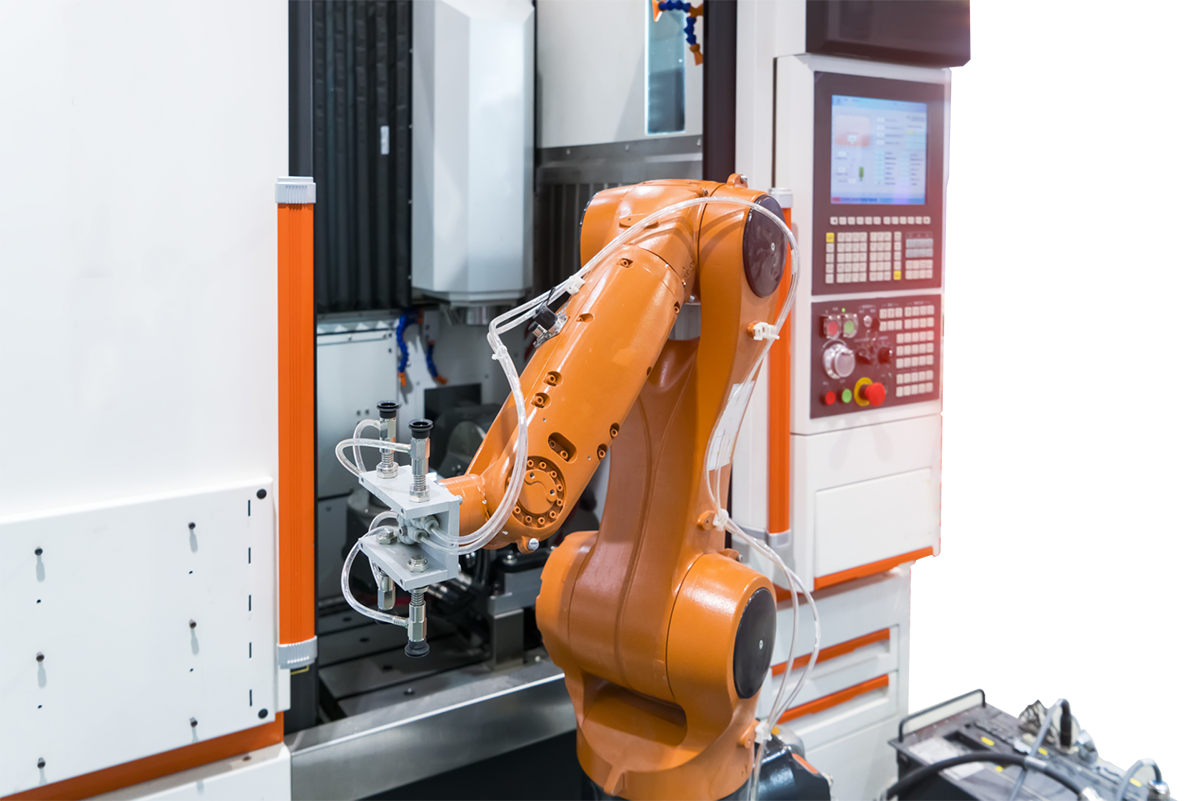
\ CNC machining centers,
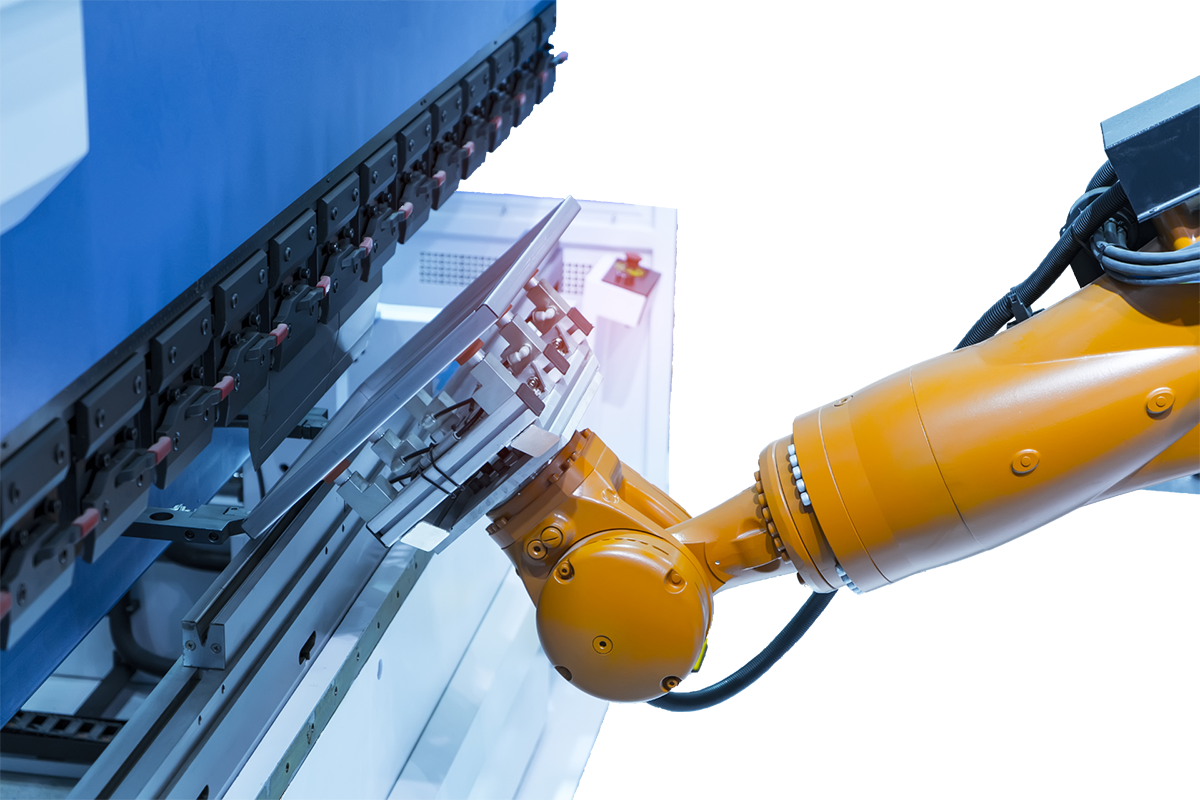
\ edge presses,
\ forging presses and hammers,
\ injection molding machines,
\ measuring and inspection machines,
\ welding cells.
solutions:
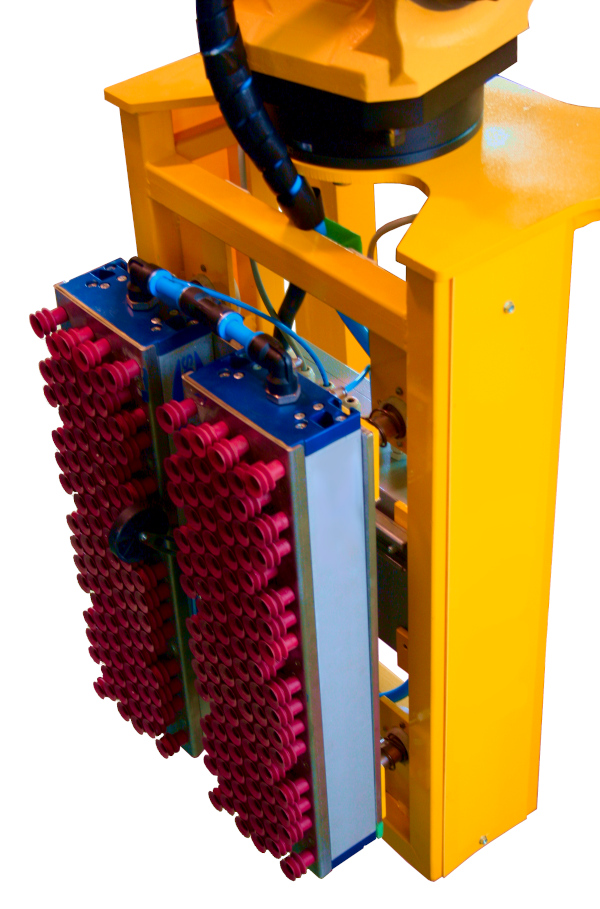
In robotized loading and unloading of machines, many types of working heads are used.
When choosing the type of head, there need to be taken into account: process dynamics, workpiece characteristics, limitations and requirements of the machining device.
Among the most commonly applied heads are used following:
\ two or three finger mechanical heads,
\ mechanical heads with a dedicated gripper,
\ vacuum pneumatic heads,
\ pulse controlled magnetic heads,
\ electromagnetic heads with adjustable holding force,
\ loading systems for machining palettes with fixtures and workpiece,
\ systems for large-size workpieces, built from a set of grippers placed on supporting structures.
Interface:
Depending on the complexity of the process, the type and age of the machine, which need to be automate, there are various available options for exchanging signals with an industrial robot.
The basic way of exchanging signals between machines is the binary interface. Individual 24VDC physical signals are exchanged by using a set of relays or optical isolators mounted in both machines. This solution is applied in simple processes, where there is less information and the speed of signals exchange is low. Such communication can be used e.g. in loading for clamping spindle on the CNC machine or unloading the injection molding machine.
In processes where the number of signals exchanged exceeds over a dozen of basic signals or it is necessary for the robot to follow the tool movement, e.g. synchronization, industrial network communication interfaces are used. These interfaces may be based on standard networks or dedicated communication devices of machine manufacturer. Such communication will allow for synchronous robot operation, e.g. with a bend press or measuring machine, during the continuous robot’s movement following the tool.
Communication capabilities are often limited by the age of the machines or the possibilities to connect with original software of the machine. Buying new machines, it is worth pay attention to the available communication interface in the machine, in particular possibilities for integration with the robot.

When handling workpieces, using an industrial robot, we have the possibility of direct work with much larger masses or dimensions of the workpieces. In addition, we get a much higher dynamics of movement than in case of human work with a balancer or an auxiliary hoist.
Loading and unloading of parts from machines, automation for CNC machining work cells, and reorientation of parts during the machining are basic advantages comes from robot. The efficiency of the CNC machining work cell, with the feeding of workpieces by industrial robot, allows you to speed up whole process up to 50%, especially when using the appropriate equipment or additional software on the machining device.
feeding system:
The universal feeding system of workpieces for a CNC machine can be connected to any machine by providing a feeding station and setting signal exchange with a CNC controller. Such a system consists of:
\ 2 or 3 loading palettes for workpieces,
\ 6-axis industrial robot selected with range and payload for workpieces and the machine,
\ universal 2 or 3 finger gripper or optional dedicated gripper,
\ guard fence with a safety system that meets the highest PLe security category,
\ drip tray for refrigerant remains.
Optional equipment includes:
\ security scanner instead of fence guard,
\ vision system for detection and control of workpiece,
\ workpieces positioner / measuring station,
\ chips removal system,
\ dedicated HMI panel to program the station.

When working with workpieces sets, there is a problem of orientation and positioning, before there can be picked up with the robot head. In some applications it is possible to use auxiliary sorting machines or indexing feeders with workpiece detection.
Equally popular are gravity or mechanical positioners with a pneumatic or electric drive, ensuring adequate accuracy of workpiece’s positioning at the place of its collection.
Another solution for loading many workpieces into the work station are trays or palettes with fixtures, where the pattern and position of each detail are strictly defined.
In applications where all above solutions are not possible to apply due to the shape of the workpiece or the specifics environment, there are advanced automation systems based on vision optic sensors, vision systems or 3D detection systems can be used.
When automating the process of loading or operating a machine using an industrial robot, all steps of the process and final quality of parts should be defined, so that the auxiliary elements necessary for automation allow to meet the requirements of production.
